PROGRAMA "SIMTRA"
APLICACIÓN WEB PARA LA SIMULACIÓN DE TRAYECTORIAS DE VEHÍCULOS
1.- Introducción
2.- Ventana principal de la aplicación
3.- Realización de una simulación
3.1.- Selección del huso UTM
3.2.- Localización del lugar donde se quiere realizar la simulación
3.3.- Definición del vehículo a utilizar en la simulación
3.4.- Coordinación con Google Street View
3.5.- Inicio de la simulación
3.6.- Finalización de la simulación
3.7.- Opciones de simulación
3.8.- Simulación por Eje
4.1.- Cambiar huso base
4.2.- Calcular coordenadas
4.3.- Calcular distancia
4.4.- Calcular radio
4.5.- Ir a punto(s)
4.6.- Exportar imagen georreferenciada
4.7.- Importar Ejes
5.- Menú Capas
5.1.- Dibujo
5.1.1.- Color
5.1.2.- Dibujar línea
5.1.3.- Dibujar arco
5.1.4.- Dibujar polilínea
5.1.5.- Dibujar polígono
5.1.6.- Dibujar Círculo
5.2.- Borrar capa dibujo
5.3.- Insertar imagen georreferenciada
5.4.- Importar KML / DXF
5.5.- Borrar capa de superposición
5.6.- Añadir capa servicio de mapas
5.7.- Azure Maps
6.- Capas actuales instaladas en la aplicación
1. - Introducción
"SIMTRA" es una aplicación web que permite simular el recorrido de un vehículo de transporte, a lo largo de un vial (existente o nuevo), calculando la trayectoria descrita y el área de barrido, tanto por el vehículo, como su carga.
En España, la Nota de Servicio 1/2018, "Actualización de las instrucciones para la emisión de los informes preceptivos y vinculantes relativos a solicitudes de autorización de transportes especiales", detalla el procedimiento a seguir para la redacción de los estudios de viabilidad geométricos necesarios para obtener los permisos para la circulación de vehículos y transportes especiales.
La aplicación SIMTRA, a partir de la geometría y dimensiones del vehículo especial, y de las ortoimágenes de satélite existentes, facilita la verificación geométrica de la viabilidad del transporte, que se hace directamente en el navegador web, sin necesidad de descargar ortofotos.
Pero también se pueden realizar simulaciones en infraestructuras nuevas, que se pueden representar en la aplicación tanto en formato ráster como vectorial, con las opciones de "insertar imagen georreferenciada" o "importar fichero KML", e "importar fichero DXF". Por tanto, su campo de aplicación se amplía al diseño de intersecciones, glorietas, etc.
En cuanto a las imágenes de satélite, para España se utiliza el servicio WMS ofrecido por el Instituto Geográfico Nacional, de ortofotos PNOA de máxima actualidad, además de los servicios TMS de Google, "Esri Arcgis" y "Mapbox". Además, con la posibilidad de ampliar la cartografía base mediante servicios WMS de ortoimágenes de otros países, se consigue que la aplicación pueda usarse en todo el mundo.
2. - Ventana principal de la aplicación
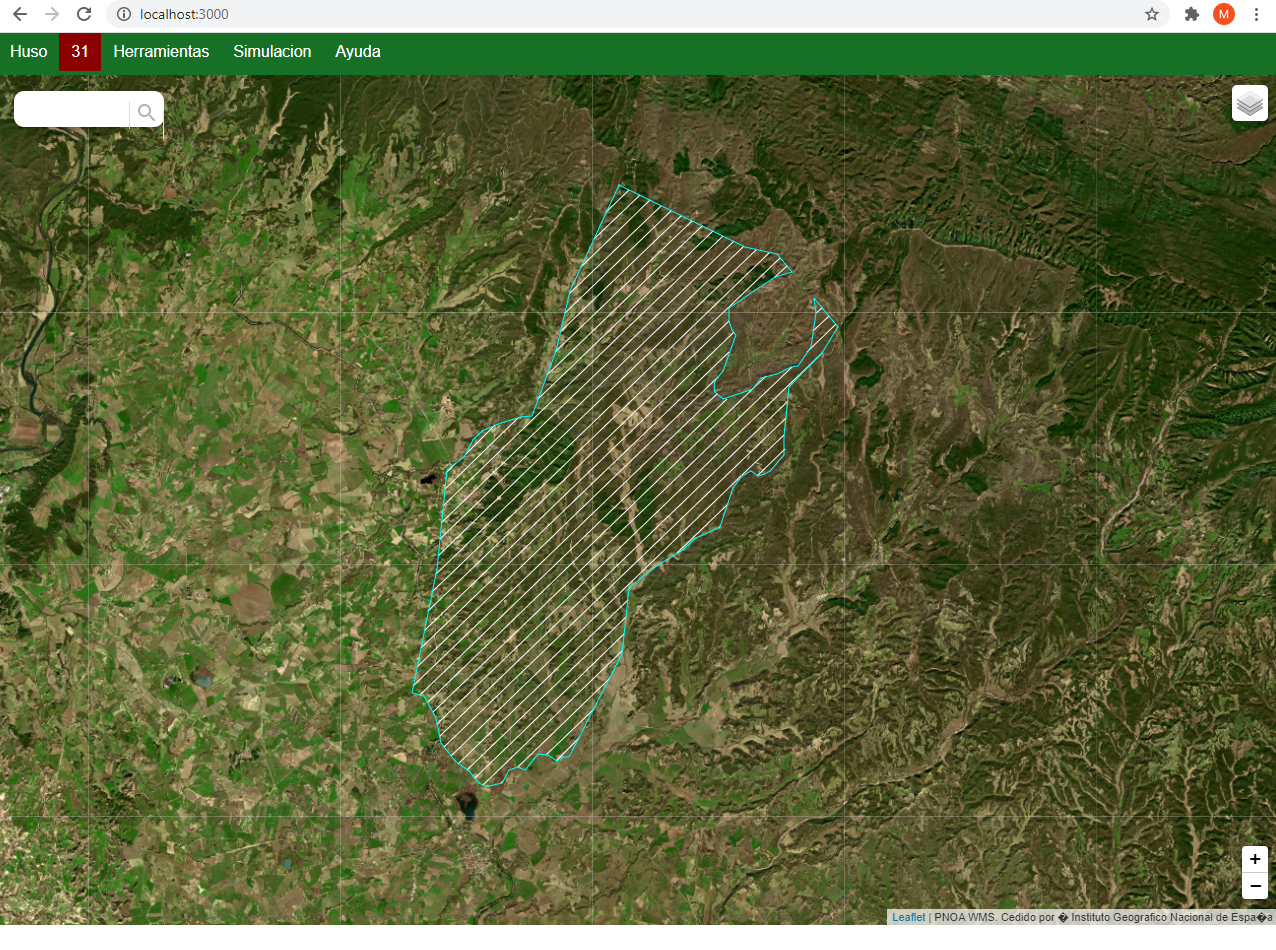
Al iniciar la aplicación, se presenta la siguiente vista:
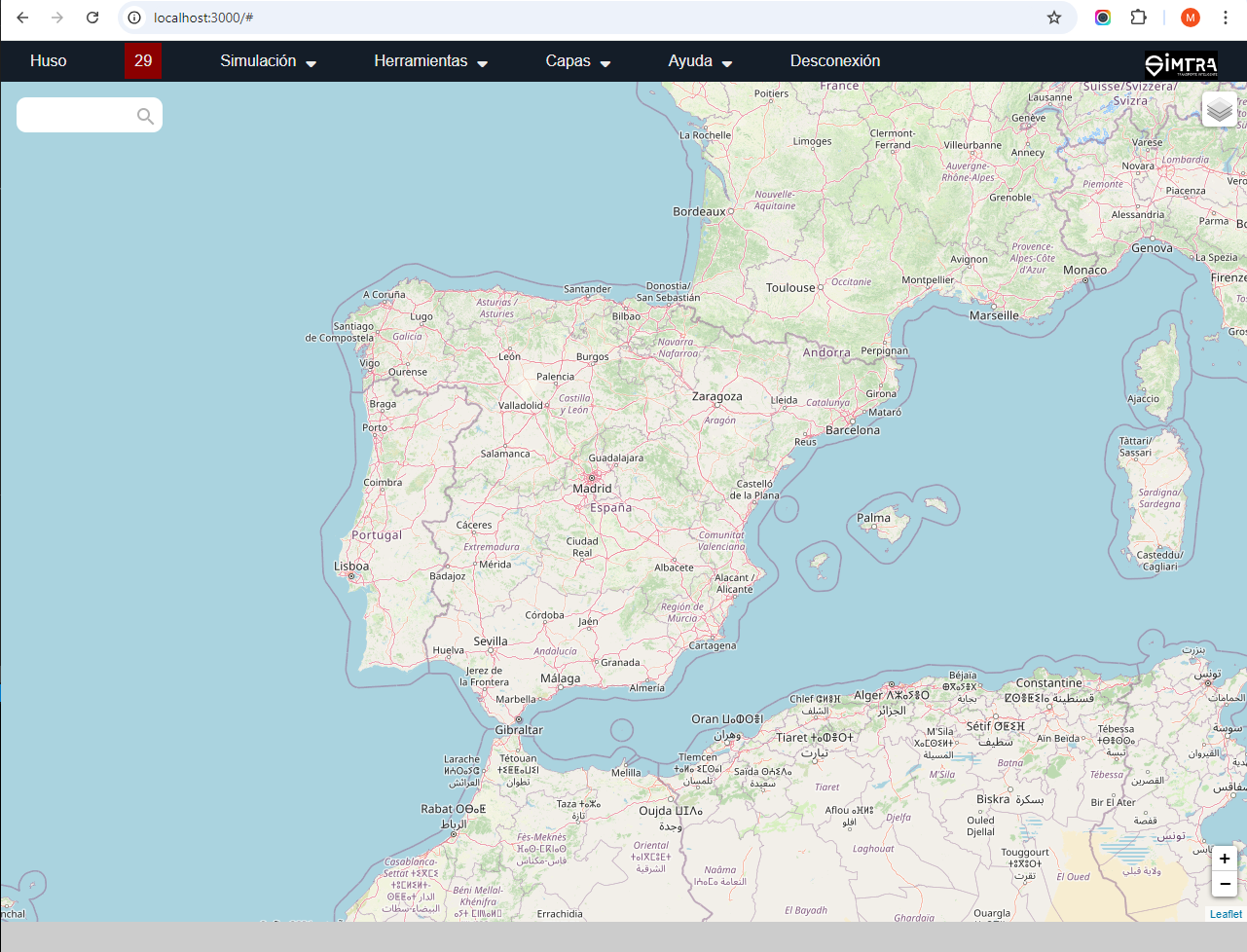
En la parte central, aparece el mapa de la aplicación, con controles de búsqueda (esquina superior izquierda), control de capas (superior derecha) y zoom (inferior derecha).
Bajo el mapa, aparece la barra de información, donde se mostrarán mensajes útiles para el usuario, en función de la opción que se esté aplicando.
3. - Realización de una simulación
3.1. - Selección del huso UTM
En el menú se puede seleccionar el huso de coordenadas UTM en que se realizarán los cálculos. Las opciones del menú se han inicializado con los husos 29, 30 y 31, correspondientes a la península ibérica, si bien existe la posibilidad de modificarlos a cualquier huso que decida el usuario, mediante la opción "Herramientas", "Cambiar huso base".
3.2. - Localización del lugar donde se quiere realizar la simulación
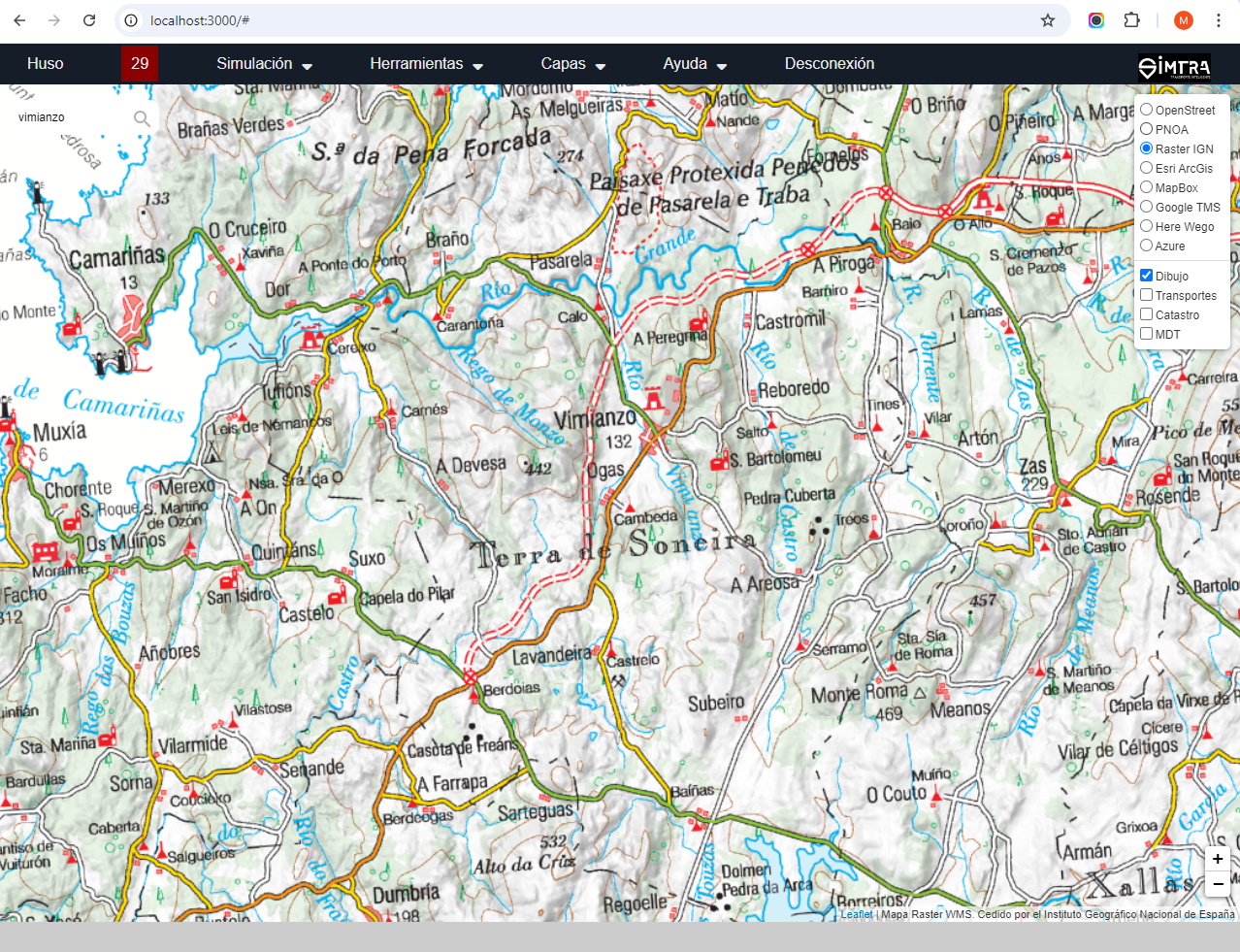
La aplicación permite seleccionar las capas correspondientes a la cartografía de "OpenStreetMaps" e IGN, facilitando la búsqueda del emplazamiento donde se quiere llevar a cabo la simulación.
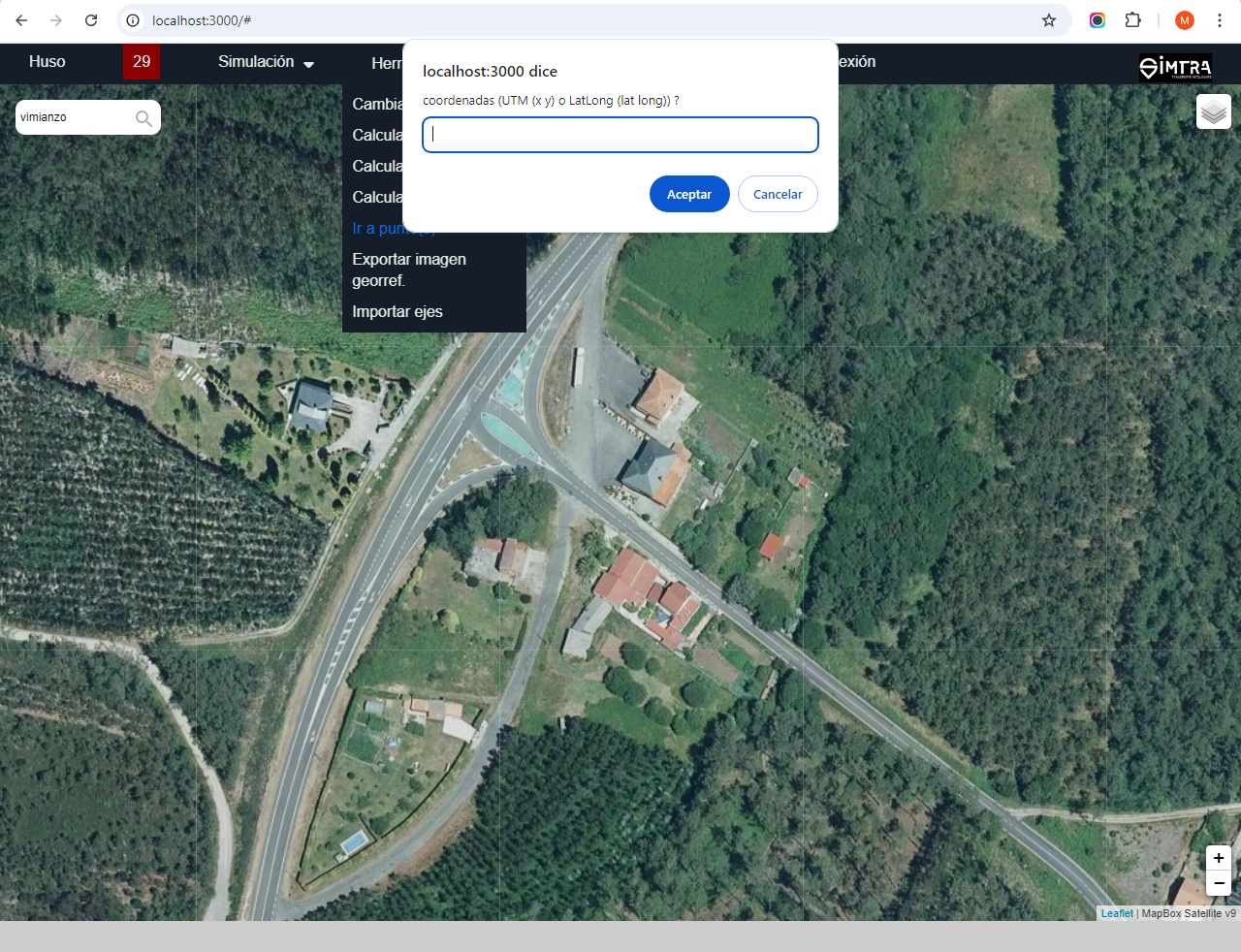
Para facilitar la localización de emplazamientos concretos, la aplicación cuenta con un control de búsqueda de topónimos, ademas de la posibilidad de dirigirse a un punto o puntos concretos (menú "herramientas", opción "ir a puntos(s)", en este caso se muestra un cuadro de diálogo donde se pueden introducir las coordenadas, que pueden ser geográficas (latitud y longitud) o UTM (en el huso seleccionado en el menú). Las coordenadas se introducen en una línea, separadas por espacios. El separador decimal puede ser coma o punto, indistintamente.
El programa indica el punto (o puntos, pueden ser varios) seleccionado con un indicador, que se coloca en la capa de superposición "dibujo". En el control de capas de la esquina superior derecha se puede modificar su visibilidad.
3.3. - Definición del vehículo a utilizar en la simulación
La aplicación permite la simulación utilizando un vehículo articulado de hasta unidades, y que tenga la posibilidad de girar el tren de ejes traseros del remolque.
La definición de la geometría del vehículo y su carga se hace mediante un sencillo formulario al que se accede en la opción "simulación", "editar vehículo". La aplicación está orientada inicialmente a vehículos articulados de dos unidades. En el diálogo, se define la geometría del vehículo en planta, coordenadas cartesianas que definen la carga, y ángulos de giro máximos de las ruedas de la unidad tractora, del remolque, y ángulo máximo permitido entre tractora y remolque. Asimismo, se pueden seleccionar los colores en los que se representarán las diferentes unidades.
El formulario permite además salvar en un fichero XML la geometría del vehículo definido, para poder ser leído posteriormente (opción abrir) en nuevas simulaciones.
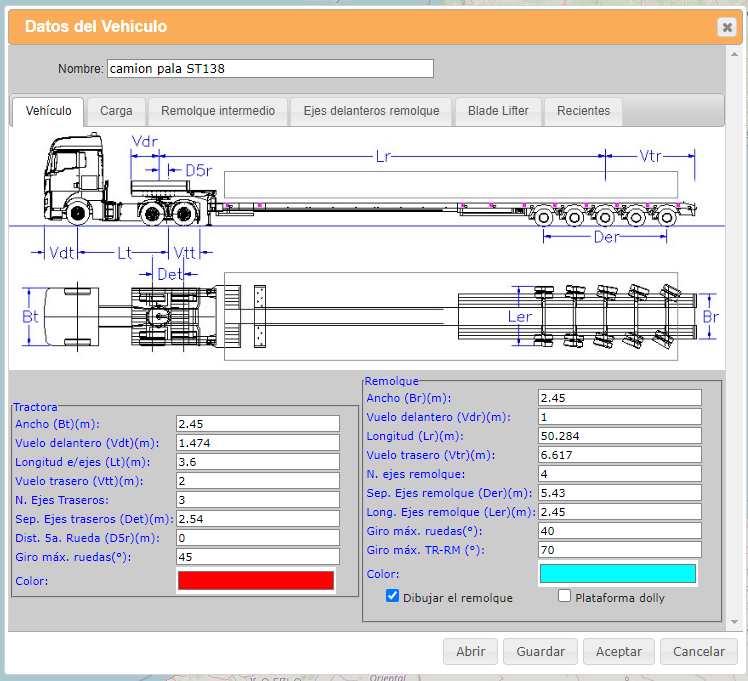
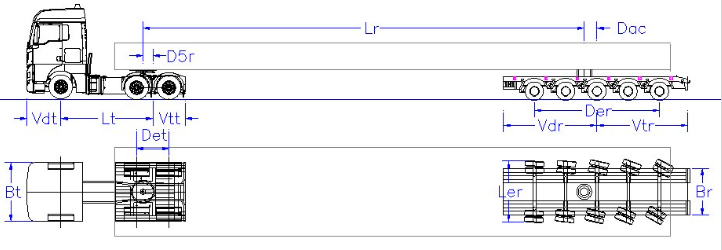
El formulario permite definir la geometría en planta del vehículo a utilizar en la simulación. Las variables que se deben indicar aparecen de manera esquemática en el croquis de la imagen:
Definición de la unidad tractora:
• Ancho (Bt)
• Vuelo delantero (Vdt): distancia desde el eje delantero hasta el frente de la unidad
• Longitud entre ejes (Lt): distancia entre el eje delantero y el centro de los ejes traseros
• Vuelo trasero (Vtt): distancia entre el centro de los ejes traseros y el final de la unidad tractora
• Nº de ejes traseros
• Separación entre ejes traseros (Det): Distancia entre el primer y último eje trasero, en caso de haber más de dos ejes, la aplicación considera que la separación entre ejes es uniforme
• Distancia a la quinta rueda (D5r): distancia entre el centro de los ejes traseros y el punto de la articulación de la unidad tractora y remolque (Quinta rueda)
• Giro máximo ruedas (º): es el ángulo máximo de giro de la ruedas directrices del eje delantero
Definición del remolque:
• Ancho (Br): la aplicación considera que el ancho de las unidades es constante
• Vuelo delantero (Vdr): distancia desde la quinta rueda hasta el frente de la unidad remolque
• Longitud entre ejes (Lr): distancia entre la quinta rueda y el centro de los ejes traseros
• Vuelo trasero (Vtr) distancia entre el centro de los ejes traseros y el final del remolque
• Número de ejes traseros del remolque
• Separación entre ejes del remolque (Der): distancia entre el primer y último eje trasero del remolque, al igual que en la unidad tractora, se considera que la separación entre ejes es uniforme
• Longitud de los ejes del remolque (Ler): los ejes pueden tener una longitud diferente al ancho del remolque, este parámetro permite definir su longitud
• Giro máximo ruedas: en el caso en que las ruedas del remolque se puedan girar, es el máximo giro permitido
• Giro máximo tractora - remolque: ángulo máximo permitido entre las unidades tractora - remolque. En el caso de ser un vehículo de 3 unidades, sería el giro máximo permitido entre remolques.
En el caso de que el remolque cuente con un tren de ejes delanteros, la pestaña correspondiente permite definir su geometría:
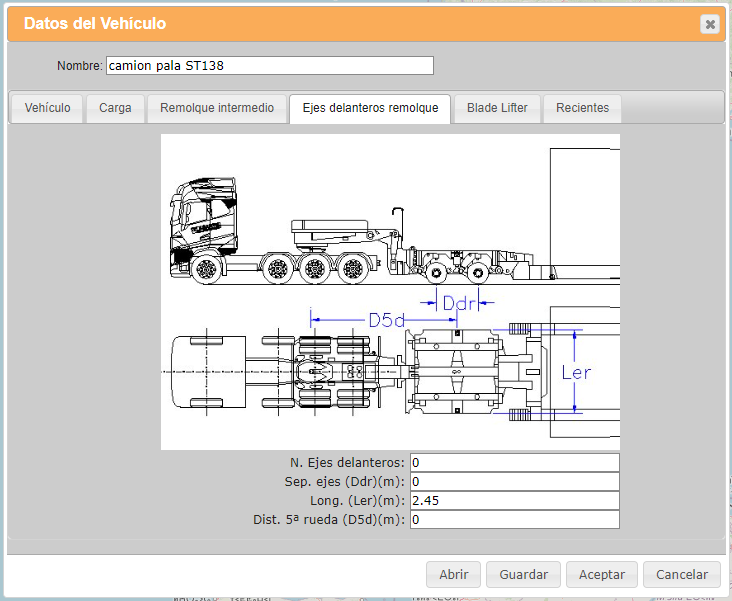
• Número de ejes del tren delantero
• Separación entre ejes (Ddr): distancia entre el primer y último eje del tren delantero
• Longitud de los ejes (Ler): como en el caso de los ejes traseros, permite especificar una longitud de ejes diferente al ancho del remolque.
• Distancia quinta rueda (D5d): separación entre el centro del tren de ejes delanteros y el punto de apoyo del remolque en la unidad tractora.
En el caso de que el remolque sea de tipo "dolly", al activar la opción correspondiente, se modifica el croquis del vehículo, y se tiene que definir una variable adicional. Además algunos parámetros cambian su significado:
• Distancia apoyo - centro ejes (Dac): separación entre el punto de apoyo de la carga del carretón trasero, y el centro del tren de ejes del remolque.
• Vuelo delantero del remolque (Vdr): para el caso de dolly, esta variable indica la distancia entre el centro de los ejes del remolque, y su extremo frontal.
Para vehículos de 3 unidades, la pestaña "Remolque intermedio" permite seleccionar esta opción, se muestran los parámetros de definición de la geometría del remolque intermedio:

los parámetros geométricos que definen esta unidad son:
• Ancho (Bi): anchura de la unidad intermedia
• Vuelo delantero (Vdi); distancia desde el punto de apoyo en la unida tractora (quinta rueda) hasta el extremo frontal del remolque
• Longitud entre ejes (Li): Distancia entre la quinta rueda y el centro de los ejes del remolque intermedio
• Vuelo trasero (Vti): distancia entre el centro de los ejes del remolque intermedio, y su extremo posterior.
• Número de ejes con que cuenta esta unidad
• Separación entre ejes (Dei): distancia entre el primer y el último eje del remolque intermedio
• Longitud de los ejes (Lei): se puede especificar una longitud de los ejes, diferente al ancho de la unidad
• Giro máximo tractora - remolque: indica el ángulo máximo permitido entre la unidad tractora y la unidad intermedia.
• Distancia quinta rueda (D5i): separación entre el centro de los ejes de la unidad intermedia, y el punto de apoyo del remolque posterior, o de la carga, en caso de ser un transporte tipo "dolly"
Definición de la carga: en caso que se desee dibujar y simular el desplazamiento de la carga, ésta se define por un máximo de 12 puntos. El origen de coordenadas para la definición de la carga se sitúa en la quinta rueda. La definición de la carga se activa al seleccionar la pestaña correspondiente:
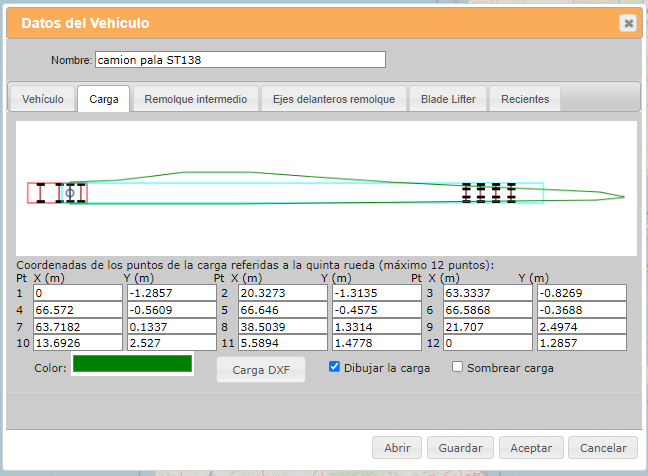
El diálogo muestra una imagen con la geometría del vehículo y carga tal cual están definidos en los diálogos, de modo que al modificar alguna coordenada, se actualiza el croquis del vehículo, facilitando así la verificación de la geometría introducida.
El checkbox "sombrear carga" permite activar o desactivar el sombreado de la carga durante el movimiento del vehículo
Para facilitar la definición de la carga, el botón "Carga DXF" permite leer desde un fichero DXF la geometría, que debe estar dibujada como una polilinea, con el origen de coordenadas, como ya se ha indicado, en la posición de la quinta rueda. En el caso en que la carga contenga más de 12 puntos, la aplicación tomará los 12 puntos más representativos de la carga:

En el caso de que el vehículo sea de tipo "Blade lifter", la pestaña correspondiente permite definir los parámetros específicos de este tipo de transporte:
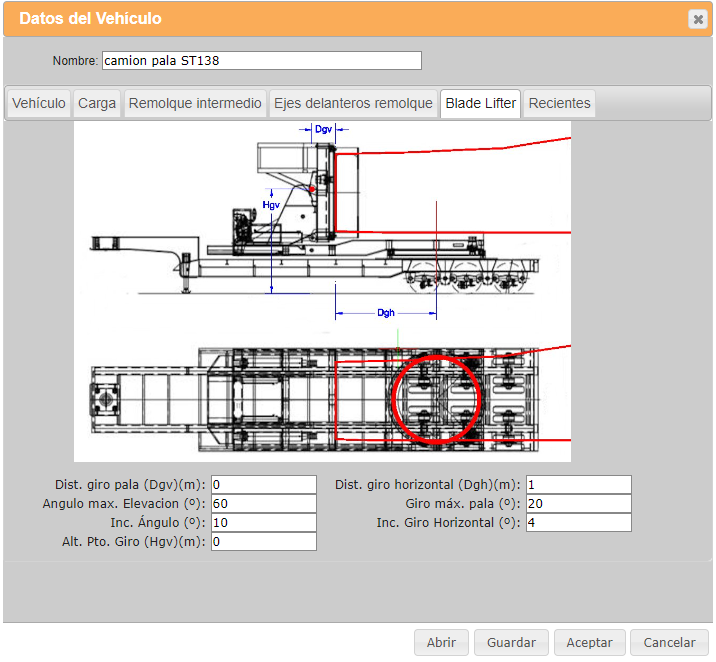
• Ángulo máx. elevación: máximo ángulo de elevación vertical de la pala
• Inc. Ángulo: incremento de ángulo al subir o bajar la pala, cada vez que se pulsan las teclas para aumentar el ángulo (tecla T) o disminuirlo (tecla G), el ángulo actual se incrementa o disminuye en este valor
• Alt. Pto. Giro: altura del punto de giro de la pala sobre el nivel del suelo
• Distancia de giro horizontal (Dgh): distancia desde el eje de giro horizontal (hacia los lados) al extremo de la pala
• Giro máx. pala: máximo ángulo de giro horizontal de la pala
• Inc. giro horizontal: incremento del ángulo de giro horizontal en la maniobra de giro, al igual que para el giro de elevación, al pulsar las teclas F o H, el ángulo de giro aumenta o disminuye en este valor
Por último, en la pestaña "Recientes" se guardan los últimos vehículos utilizados.
El formulario de definición del vehículo, cuenta con botones para guardar la geometría definida en un fichero XML, que posteriormente puede recuperarse con el botón "Abrir". El fichero se guarda en la carpeta que esté definida en las opciones del navegador, para almacenar las descargas, y que se puede modificar en las opciones de configuración del navegador utilizado para ejecutar la aplicación.
Plantillas de vehículos: en el apartado de "descargas" se pueden seleccionar y descargar diferentes tipo de vehículos, que facilitan la definición del vehículo deseado, simplemente modificando los parámetros geométricos del vehículo base descargado
3.4. - Coordinación con Google Street View
Es posible coordinar los saltos de las simulaciones con las vistas de Google Street View, en caso de que estén disponibles (es un servicio ofrecido por Google por lo que no se puede garantizar que existan vistas en cualquier localización).
Para ello es necesario contar con una clave o API KEY obtenida mediante una cuenta de Google Cloud Platform (https://cloud.google.com/). Póngase en contacto con nosotros para mayor información y asistencia de como obtener esta clave.
Una vez obtenida la clave, se debe introducir en la aplicación en la opción "Street View" del menú "Simulación", a partir de este momento la opción de coordinación con street view estará disponible.
La ventana con la vista de street view se puede activar o desactivar durante la simulación pulsando la tecla "S".
La clave o API KEY se almacena en la configuración del navegador, por lo que estará disponible para futuras sesiones.
3.5. - Inicio de la simulación
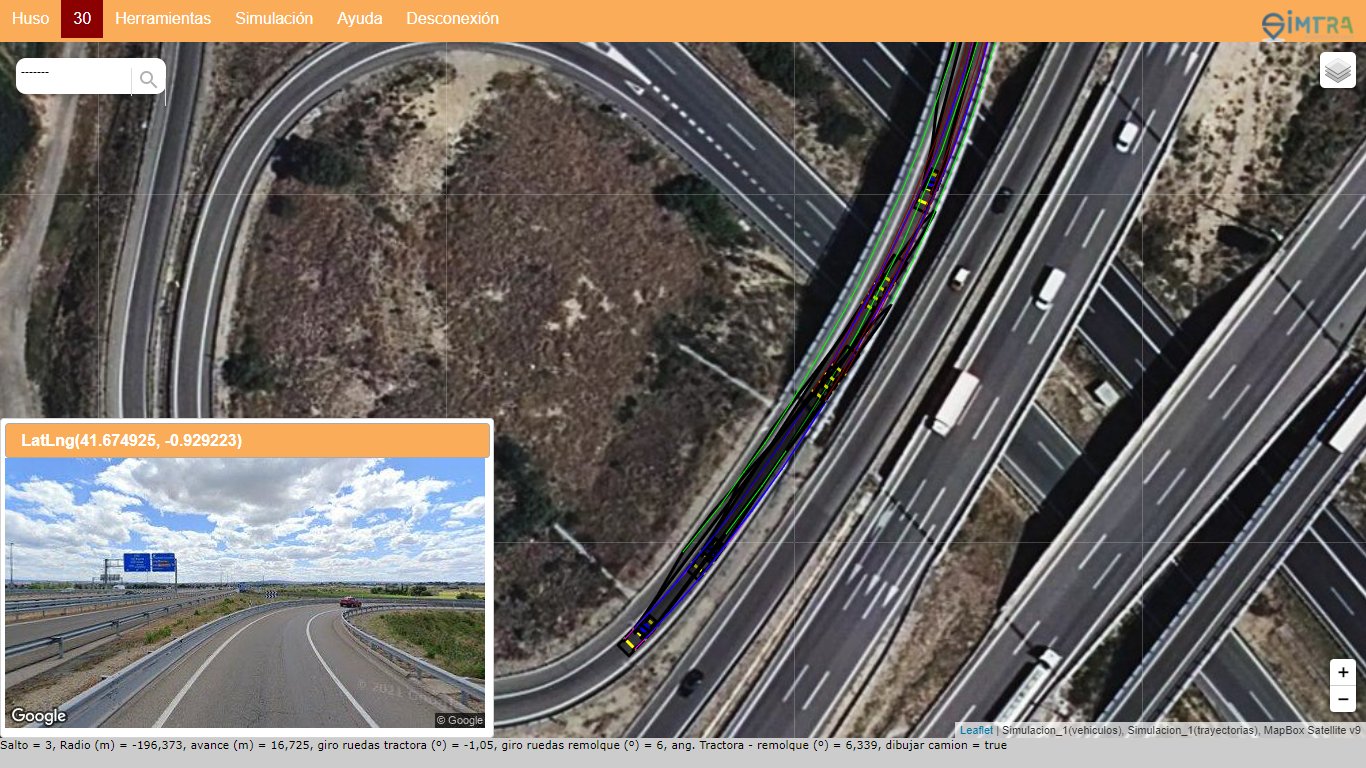
Una vez definida la geometría del vehículo y seleccionada la ubicación, con el dispositivo señalador se ubica la localización y dirección del primer vehículo:
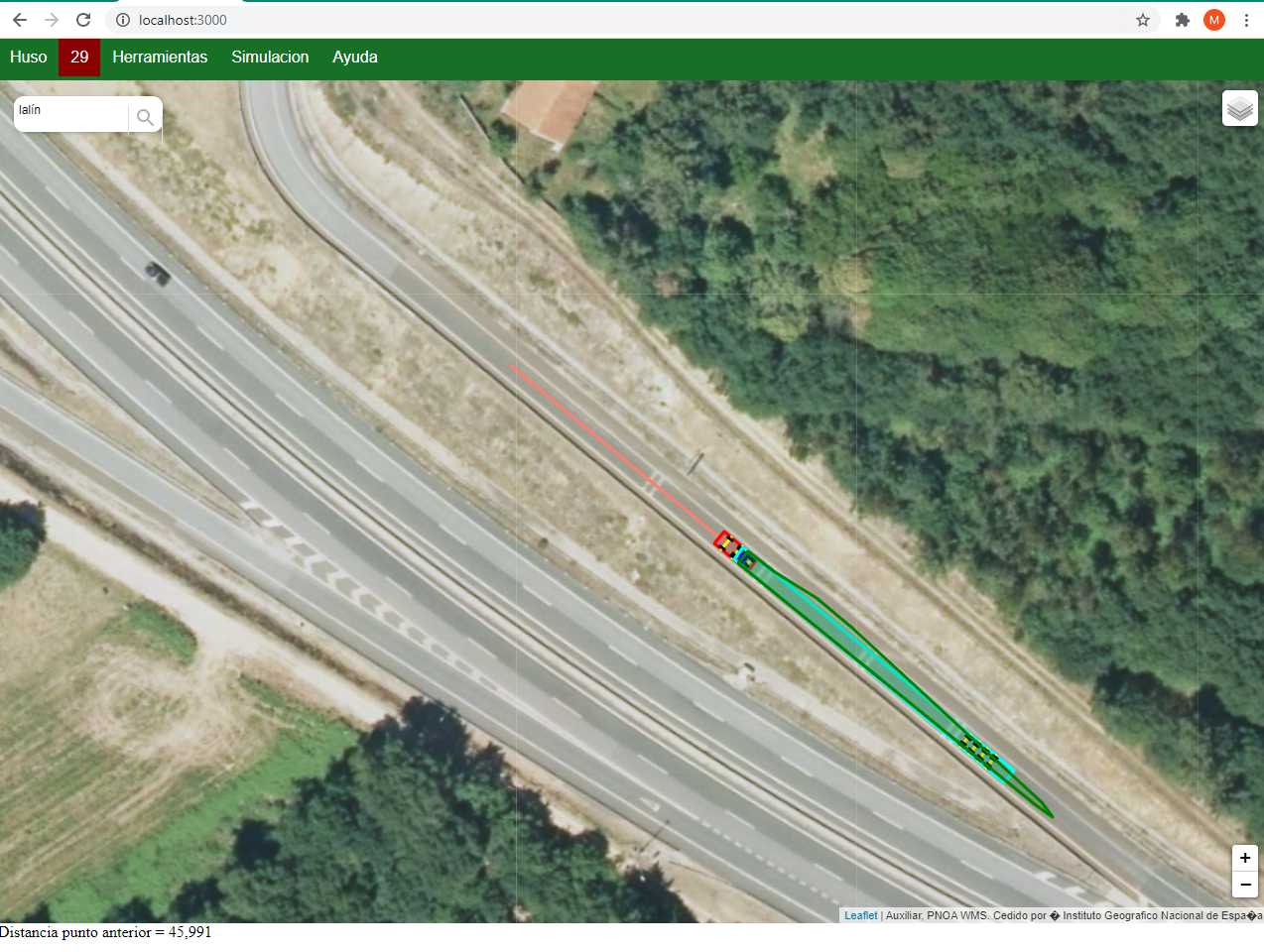
Una vez posicionado el camión, se selecciona el punto hacia donde se quiere que avance el camión, con el ratón. Al mover la posición del cursor, se muestran las trayectorias que describirán las ruedas extremas del vehículo y los puntos extremos de la carga. La barra de información indica en cada momento:
• radio de giro
• avance
• giro de las ruedas de la unidad tractora
• giro de las ruedas del remolque, que se controla mediante las teclas Z (giro a izquierda) y X (a derecha)
• ángulo de la unidad tractora
• dibujo del camión: se puede seleccionar si se dibuja el camión y las trayectorias, o solo éstas, al pulsar la tecla espaciadora (útil cuando se quiere afinar la trayectoria descrita y se desea que el resultado sea claro)
• en el caso de que el vehículo sea de tipo "blade lifter", también se indican los ángulos de elevación y giro horizontal de la pala
Se va obteniendo el resultado de la trayectoria descrita por el vehículo y su carga:
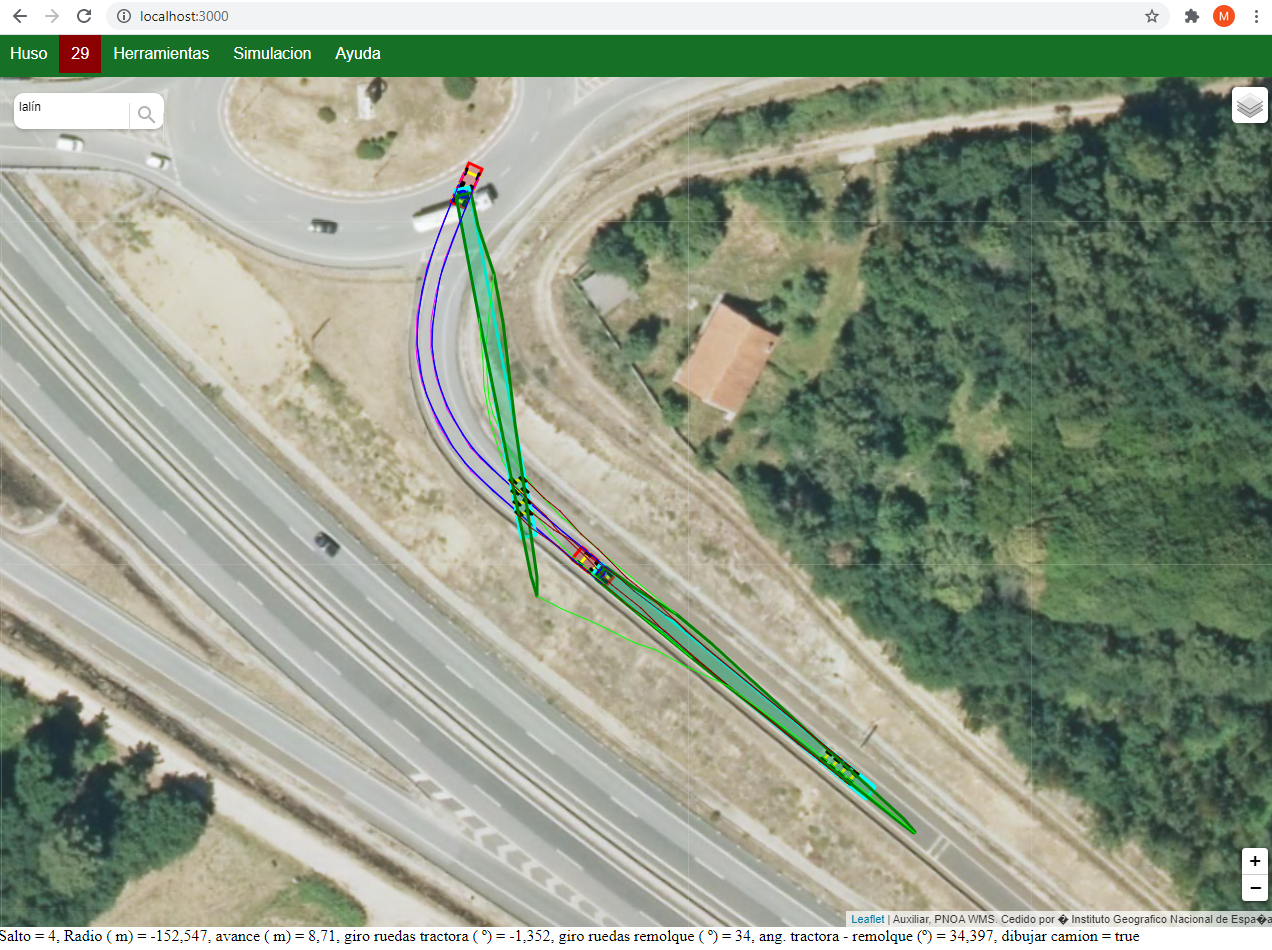
En cada simulación se puede dar un número ilimitado de saltos, el desplazamiento de la imagen de fondo (mediante las flechas del teclado o haciendo clic y arrastrar) permiten dar continuidad a la simulación aunque en la pantalla se vea únicamente una parte reducida del itinerario.
El desarrollo de la simulación se controla además con el teclado:
tecla Q: deshace el último salto realizado
teclas J, L: permiten corregir el radio de giro una vez posicionado el camión (y antes de mover nuevamente el cursor)
teclas I, M: permiten corregir el avance del vehículo, una vez posicionado (y antes de mover nuevamente el cursor)
teclas Z, X: modifican el ángulo de giro de las ruedas de la unidad remolque.
tecla B: activa / desactiva el sombreado del área barrida por la carga
tecla S: activa / desactiva la vista de Street View, en caso de contar con esta opción.
tecla ESPACIO: activa / desactiva el dibujo del vehículo. Útil cuando se pretende ajustar una trayectoria con saltos relativamente cortos, obteniendo un dibujo más claro.
Tecla ESCAPE: anula y borra la simulación
Teclas T, G: controlan el ángulo de elevación de la pala, para "blade lifter"
Teclas F, H: controlan el giro horizontal de la pala, para "blade lifter"
3.6. - Finalización de la simulación
Pulsando la tecla V, o ENTER, se valida la simulación, el programa pregunta un nombre con el que guardar la simulación:
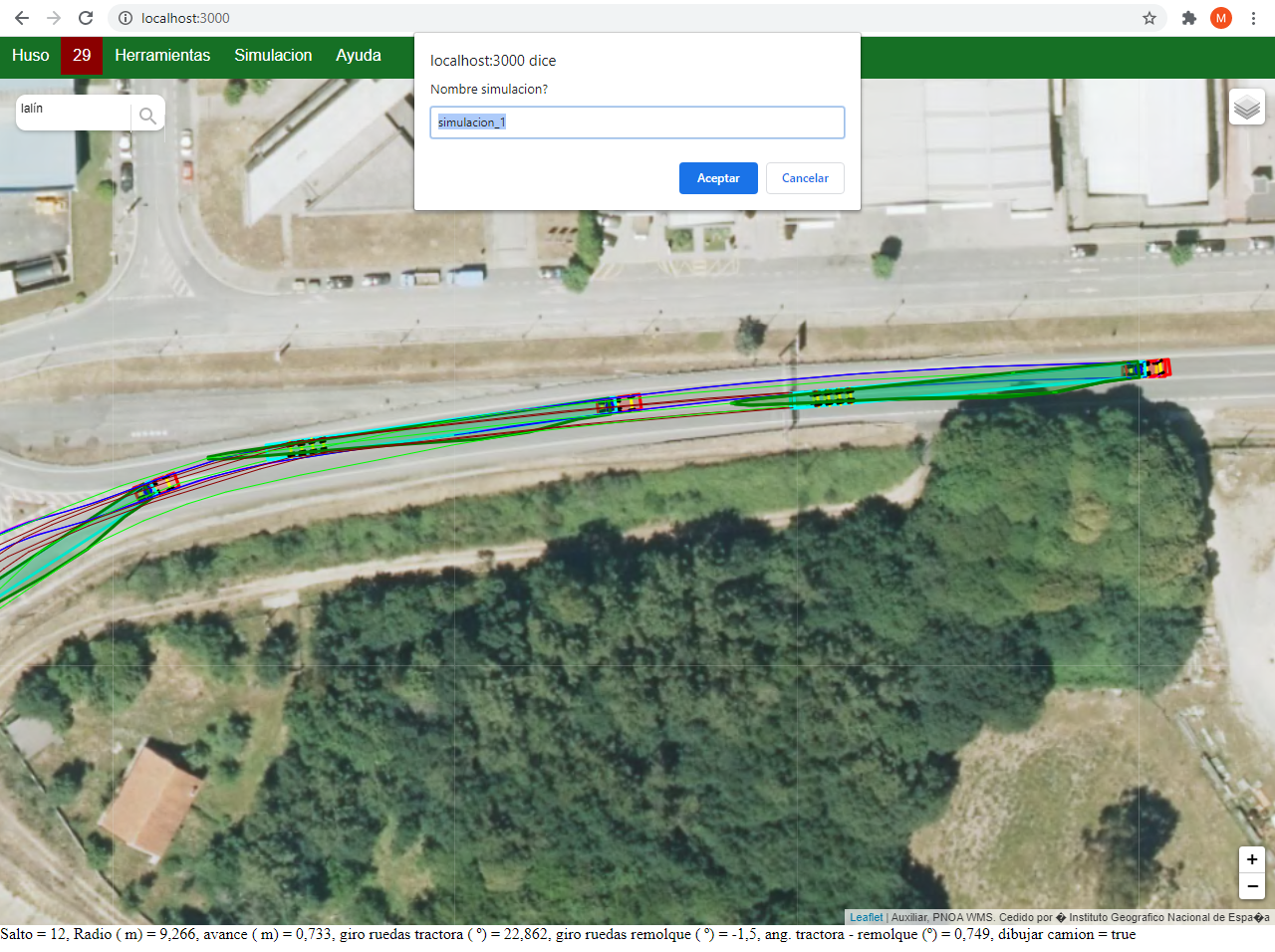
Se introduce el nombre con el que se quiere salvar la simulación, entonces la aplicación crea dos capas de superposición, cuya visibilidad se puede modificar con el control de capas:
simulación XXX (vehículos) donde se han dibujado únicamente los vehículos
simulación XXX (trayectorias) donde se han dibujado únicamente las trayectorias de ruedas y carga, en su caso
Se pueden realizar cuantas simulaciones sean necesarias, lo que permitirá por ejemplo, hacer varias opciones y seleccionar la adecuada en cada caso.
3.7. - Opciones de simulación
Una vez realizadas una o varias simulaciones, es posible:
- Borrar simulación: es posible borrar la simulación activa, que es la última realizada, o bien, la última seleccionada como visible en el control de capas. Es necesario confirmar el borrado.
- Centrar simulación: en el caso de varias simulaciones realizadas, se puede centrar en la pantalla la simulación activa, facilitando su localización.
- Salvar simulación: esta opción genera un fichero XML con el cálculo de la simulación, que incluye la geometría del camión, posición y giro del camión en cada salto, etc. Imprescindible salvar una simulación que quiera reutilizarse en una sesión posterior.
- Abrir simulación: esta opción permite recuperar una simulación realizad en una sesión anterior, centrándola en la pantalla
- Continuar simulación: permite iniciar una nueva simulación, desde una posición intermedia de una anterior, seleccionando con el ratón la posición del vehículo con la que se desea comenzar.
- Cortar simulación: En el caso en que se pretenda eliminar los últimos saltos de una simulación, indicando con el cursor la última posición que se quiere mantener, se borran los saltos posteriores a la posición seleccionada.
- Prolongar simulación: Con esta opción se continua la simulación activa, desde la última posición del vehículo,
las auevas posciciones se añaden a la misma simulación.
- Exportar DXF: esta opción genera un fichero DXF compatible con diversos programas CAD, para la preparación de planos. El sistema de coordenadas es UTM, en el huso seleccionado para realizar la simulación.
- Exportar KML: genera un fichero KML (keyhole markup language) que se puede importar en aplicaciones externas GIS o Google Earth.
3.8. - Simulación por eje
Opción que se activa después de importar un fichero de ejs en formato LandXML, MDT o CLIP. Permite hacer una simulación automática a los largo de un eje.
Después de seleccionar esta opción (y habiendo definido previamente el vehículo con el que realizar la simulación), Se tiene que seleccionar en pantalla el eje y extremo por donde comenzar la simulación. A continuación un cuadro de diálogo permite definir algunas opciones:
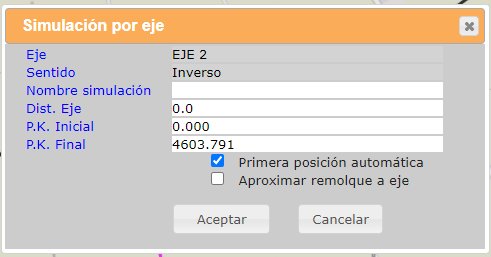
- Eje: nombre del eje sobre el que se hará la simulación, es el definido en el fichero de ejes importado
- Sentido: puede ser directo o inverso, según el extremo del eje que hayamos seleccionado en pantalla
- Nombre simulación: Nombre de la capa de superposición donde se mostrará la simulación realizada.
En caso de dejar este campo en blanco, la simulación se nombrará automáticamente con el nombre del eje y el sentido de avance
- Distancia al eje: distancia desde el eje definido al eje de la trayectoria de la simulación; valores positivos desplazan el vehículo
hacia la derecha del eje
- Puntos kilométricos inicial y final: en caso en que se desee hacer una simulación parcial, permite definir el tramo del eje en el que
se realizará la simulación automática
- Primera posición automática: En caso de seleccionar esta opción, el vehículo se orientará
en la dirección del azimut del eje en el punto en que se inicia la simulación; en caso de no seleccionarse, antes del
inicio de la simulación, se solicitará al usuario que oriente el vehículo designando el punto hacia el que apuntar
- Aproximar remolque a eje: En caso de seleccionar esta opción, para remolques en los que se puedan girar los ejes, se calcula en cada
posición el ángulo de giro de las ruedas de modo que el centro de los ejes traseros del remolque discurran lo más cerca
posible del eje de la trayectoria

4. - Menú herramientas
El menú "Herramientas" contiene una serie de utilidades que amplían la funcionalidad de la aplicación:
Cambiar huso base: como se ha explicado, el menú cuenta con 3 husos que son los habituales en España, se puede modificar el huso base (por defecto el 29) para utilizarse en otros países
Calcular coordenadas: haciendo clic en un punto de la pantalla, se indican sus coordenadas UTM en el huso de referencia
Calcular distancia: se calculan las coordenadas de dos puntos en pantalla, y la distancia y ángulo entre ellos
Calcular radio: permite calcular el radio de un arco que pasa por tres puntos designados en pantalla.
Ir a punto(s): se desplaza a uno o varios puntos definidos por coordenadas, geográficas o UTM, marcándolos además en la capa "dibujo"
Exportar imagen georreferenciada: exporta la imagen visible en pantalla, en formato JPG, y calcular y genera el archivo de georreferenciación JGW que permite insertar las imágenes en otros programas (GIS o CAD). El sistema de coordenadas de georreferenciación es UTM en el huso seleccionado en pantalla
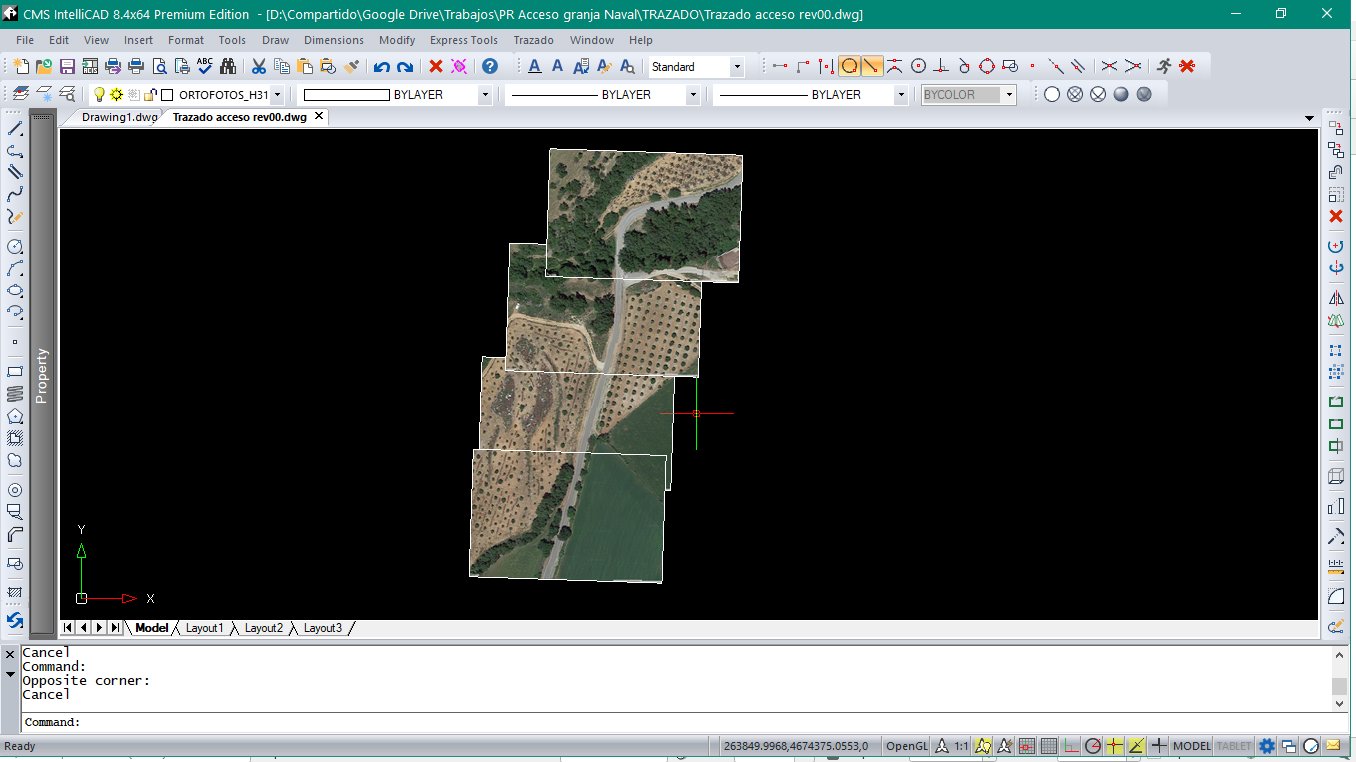
En caso de que se esté eejcutando la aplicación CAD, la imagen exportada se insertará automáticamente en el fichero de dibujo abierto
Importar ejes: Se utiliza para importar uno o varios ejes en planta, definidos en formato "LandXML", o en los formatos ASCII de MDT o CLIP
Todos los ejes definidos dentro del mismo archivo se dibujan en una nueva capa de superposición con el nombre del fichero importado.
5. - Menú Capas
El menú "Capas" incluye opciones para dibujar diferentes figuras geométricas en la capa de dibujo, así como añadir nuevas capas a partir de ficheros DXF, KML, imágenes JPG georreferenciadas, y nuevas capas en línea tipo WMS o WTMS
5.1. - Dibujo: Este submenú se utiliza para añadir diferentes figuras geométricas en la capa de dibujo, que se puede activar o desactivar en el control de capas de la aplicación
Color: Haciendo click en el control de color, se selecciona el que se utilizará para dibujar las entidades gráficas
Línea: Dibuja una línea recta entre dos puntos seleccionados en la ventana de la aplicación
Arco: Dibuja un arco que pasa por tres puntos, designados en pantalla
Dibujo de polilínea: Dibuja una polilinea y calcula su desarrollo
Dibujo de polígono: dibuja un polígono y calcula su área y perímetro. El dibujo tanto de la polilínea como del polígono se controla con el teclado:
- Tecla 'Q': deshace el último punto seleccionado
- Tecla 'ESC': cancela la ejecución
- Tecla 'V' o 'ENTER': finaliza el dibujo de la polilínea o polígono
Dibujar círculo: dibuja un círculo definido a partir del punto central y radio seleccionados sobre el mapa
5.2. - Borrar capa "dibujo": se eliminan de la pantalla los elementos dibujados, con las opciones anteriores, en esta capa.
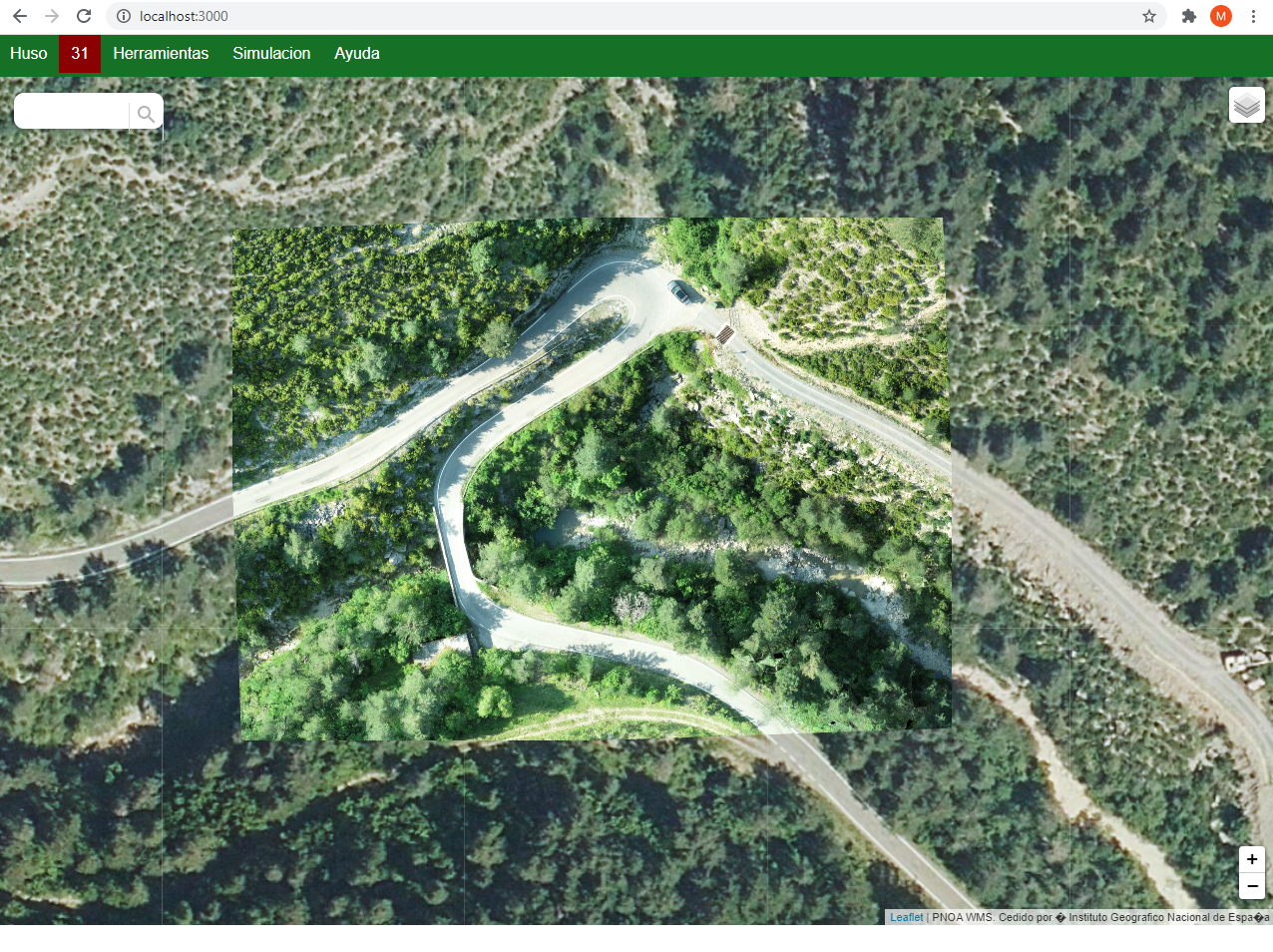
5.3. - Insertar imagen georreferenciada: permite insertar una imagen, en formato JPG, georreferenciada con un archivo JGW, en coordenadas UTM (con el huso definido en el menú), lo que permite añadir imágenes tomadas con drones, obtenidas con otras aplicaciones o incluso dibujos de nuevas infraestructuras no reflejadas en las ortofotos que sirvan de base para realizar simulaciones
Al seleccionar esta opción se abre un cuadro de diálogo con el que se deben seleccionar los dos ficheros, con el mismo nombre y con extensiones 'jpg' y 'jgw'
5.4. - Importa KML / DXF: inserta en la aplicación una capa vectorial definida en un archivo KML o DXF, centrando la vista en la capa cargada, que se añade al control de capas como capa de superposición:
Esta opción permite por ejemplo, insertar en la aplicación intersecciones o accesos que no aparecen en las ortoimágenes, o en fase de proyecto, para realizar simulaciones:

Las entidades soportadas en la importación de un fichero DXF son:
- Líneas (LINE)
- Polilíneas (POLYLINE y LWPOLYLINE)
- Superficies de 3 o 4 lados (3DFACE)
- Triángulos y cuadriláteros de relleno sólido (SOLID)
- Puntos (POINT)
- Círculos (CIRCLE) y arcos (ARC)
- Elipses y arcos elípticos (ELLIPSE)
- Splines cúbicas naturales de orden 3 (SPLINE)
- Multilíneas o líneas múltiples (MLINE)
5.5. - Borrar capa superposición: permite borra la última capa de superposición seleccionada o dibujada.
5.6. - Añadir capa de servicio de mapas: Permite al usuario añadir una capa base desde un servicio de mapas (WMS, Web Map Service, TMS, Tile Map Service o WTMS), al seleccionar esta opción se muestra un diálogo donde se especifica la URL y varios parámetros necesarios para que sea posible agregar una capa adicional:
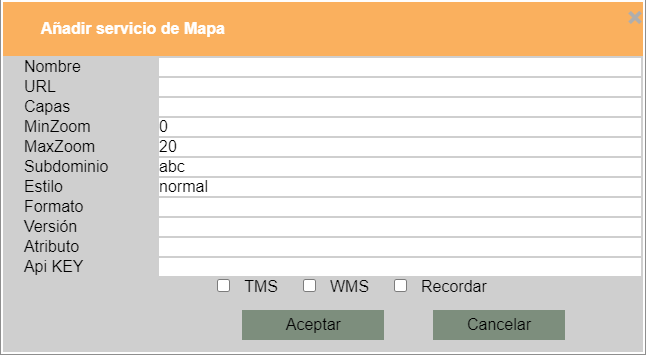
• Nombre que aparecerá en el control de capas de la aplicación (obligatorio)
• URL del servicio (por ejemplo, para las imágenes PNOA de máxima actualidad, "http://www.ign.es/wms-inspire/pnoa-ma") (obligatorio)
• Lista de valores separados por coma de las capas contenidas en el servicio que se quieren incorporar al mapa
• Nivel de zoom mínimo (opcional, por defecto 0)
• Nivel de zoom máximo (opcional, por defecto 20)
• Subdominio del servicio teselado (opcional, por defecto 'abc'), se puede especificar en forma de cadena de texto (donde cada letras es el nombre de un subdominio) o como una matriz de cadenas de texto
• Estilo (opcional)
• Formato (opcional), los más habituales son 'image/jpg' e 'image/png'
• Versión del servicio, para capas WMS
• Atributo (opcional) texto que aparece al pié de la pantalla cuando se selecciona
• Api KEY o clave de acceso al servicio (opcional), especificar solo cuando es necesario
• TMS: seleccionar en el caso en que el servicio sea TMS (Tile Map Service)
• WMS: seleccionar en el caso en que el servicio sea WMS (Web Map Service)
• Recordar: se guarda la información de la capa añadida para que se añada en los sucesivos inicios de sesión
5.7. - Azure Maps: Es posible añadir la capa WMS de satélite de Azure Maps, facilitando la clave de suscripción de Azure Maps. Con una clave válida, la capa de imágenes de satélite de Microsoft Azure se añade al control de capas de la aplicación. Solicite información sobre como crear y activar una cuenta de Azure Maps
6. - Capas actuales instaladas en la aplicación
En el momento actual, la aplicación cuenta con las siguientes capas base:
Capas cartográficas:
* Ráster IGN: cartografía del Instituto Geográfico Nacional (España)
* OpenStreet: cartografía base de https://www.openstreetmap.org
* PNOA: Imágenes satélite de máxima actualidad, IGN (España)
* Esri ArcGis
* Mapbox
* Here Wego
* Google
* Transportes: red de infraestructuras de transportes, Ministerio de Fomento (España)
* Catastro: servicio WMS ofrecido por la Dirección General del Catastro (España)
* Modelo MDT: modelo digital de terreno de elevaciones, IGN (España)